
 平台热线
平台热线



迅速改变单个点的姿态不改变位置的方法:
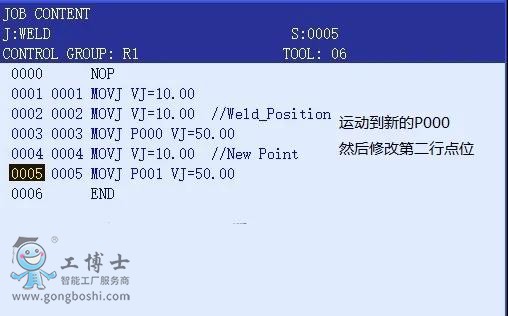
1.如下,第二行的点就是我们需要改变姿态而不希望改变位置的点,首先机器人运动到需要改变姿态的点,并在下方增加一个同一位置的以P变量表示的点。

2.P变量保存为base坐标下的点。

3.通过示教器将机器人移动到我们需要的姿态,位置大概即可。

4.在新的点下方再次添加一个P变量表示的点,与新点位置一致,同样保存为base坐标下的点。

5.比较P000与P001的姿态,发现下面框出的部分有所差异。

6.将P000的姿态改成与P001一致。

7.将机器人运动到更改过后新的P000位置后,此时再修改第二行的点,就实现了更改姿态,不改变点的位置的目的。其他精度要求不高的过渡点,就很轻松编写。
如果是一些搬运应用场合,多条路径点都为***点,需要修改很多点。也可以借鉴以上方法。一般多条路径点为同一个姿态,一段路径程序只会有少量的不同姿态数据。所以只需要在姿态发生改变时才需要测试出姿态数据。多点批量修改步骤:
1.将所有点再用P变量保存一次,如下12,34,56,78都为同一点位。

2.利用上面的单点改姿态的的方法测试所需要的姿态,比如下面路径有两个姿态,只需要测试两个姿态数据。

3.根据测试结果,修改所有P变量的姿态数据,然后姿态测试点作为起始运动点(因为测试点是我们需要的姿态点,否则姿态可能不对),跳过之前的姿态不对的非P变量点,逐一运动到修改姿态后的P变量点,然后修改非P变量点,就得到位置没有变化,姿态发生改变的路径。再删除多余的P变量路径。***好备份一下原始路径,否则操作错误导致路径无法恢复。

1.如下,第二行的点就是我们需要改变姿态而不希望改变位置的点,首先机器人运动到需要改变姿态的点,并在下方增加一个同一位置的以P变量表示的点。
2.P变量保存为base坐标下的点。
3.通过示教器将机器人移动到我们需要的姿态,位置大概即可。
4.在新的点下方再次添加一个P变量表示的点,与新点位置一致,同样保存为base坐标下的点。
5.比较P000与P001的姿态,发现下面框出的部分有所差异。
6.将P000的姿态改成与P001一致。
7.将机器人运动到更改过后新的P000位置后,此时再修改第二行的点,就实现了更改姿态,不改变点的位置的目的。其他精度要求不高的过渡点,就很轻松编写。
如果是一些搬运应用场合,多条路径点都为***点,需要修改很多点。也可以借鉴以上方法。一般多条路径点为同一个姿态,一段路径程序只会有少量的不同姿态数据。所以只需要在姿态发生改变时才需要测试出姿态数据。多点批量修改步骤:
1.将所有点再用P变量保存一次,如下12,34,56,78都为同一点位。
2.利用上面的单点改姿态的的方法测试所需要的姿态,比如下面路径有两个姿态,只需要测试两个姿态数据。
3.根据测试结果,修改所有P变量的姿态数据,然后姿态测试点作为起始运动点(因为测试点是我们需要的姿态点,否则姿态可能不对),跳过之前的姿态不对的非P变量点,逐一运动到修改姿态后的P变量点,然后修改非P变量点,就得到位置没有变化,姿态发生改变的路径。再删除多余的P变量路径。***好备份一下原始路径,否则操作错误导致路径无法恢复。
来源:网络
更多资讯:安川机器人
